
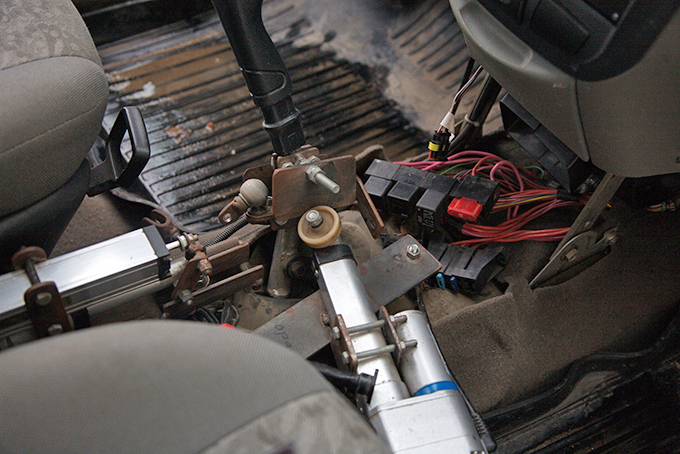
на глазах руль вращается, а рычаг волшебным образом перемещается из одного положения в другое, поневоле хочется себя ущипнуть – чур меня! Сегодня территорию Научно-исследовательского автомобильного и автомоторного института бороздят несколько беспилотных машин: ШАТЛ, показанный на Московском автосалоне в 2016 г., седельный тягач КамАЗ, который учат обходиться без водителя именно здесь в Москве, и несколько «Калин». Первая из них появилась на свет в 2012 году, когда Министерство промышленности и торговли объявило конкурс на создание беспилотника. Инженеры НАМИ конкурентов обошли, решив задачу в сжатые сроки, – уже через пять месяцев доработанная серийная «Лада» самостоятельно проехала по заданному маршруту на полигоне, разогнавшись до 60 км/ч, распознав при этом более десятка дорожных знаков и среагировав на внезапно возникшее препятствие габаритами с трехгодовалого ребенка.

И НИКАКИХ ЛАЗЕРОВ!
К месту ознакомления «Калина» подкатила сама – оператор управлял ею с ноутбука, сидя на пассажирском сиденье. Усаживаясь сзади, интересуюсь у директора Центра «Информационных и интеллектуальных систем» ФГУП «НАМИ» Дениса Ендачева: «А где же лидар»? «В багажнике лежит, – отвечает Денис, который учит ездить и автономный КамАЗ, – давно не используем – отработанная тема». Главное преимущество лидара - это технология получения и обработки информации дистанционного зондирования с помощью активных оптических систем (в т.ч. лазеров),) – практически полное отсутствие помех, от чего страдают радары всех типов, а вот в непогоду он «видит» настолько плохо, что становится совершенно бесполезным. К слову, за границей нет единства по поводу лидаров: основатель Tesla Илон Маск их забраковал, а вот эксперты Google, которые в конце прошлого года передали все разработки новой компании Waymo и «умыли руки», наоборот, ставили лазер на все опытные образцы.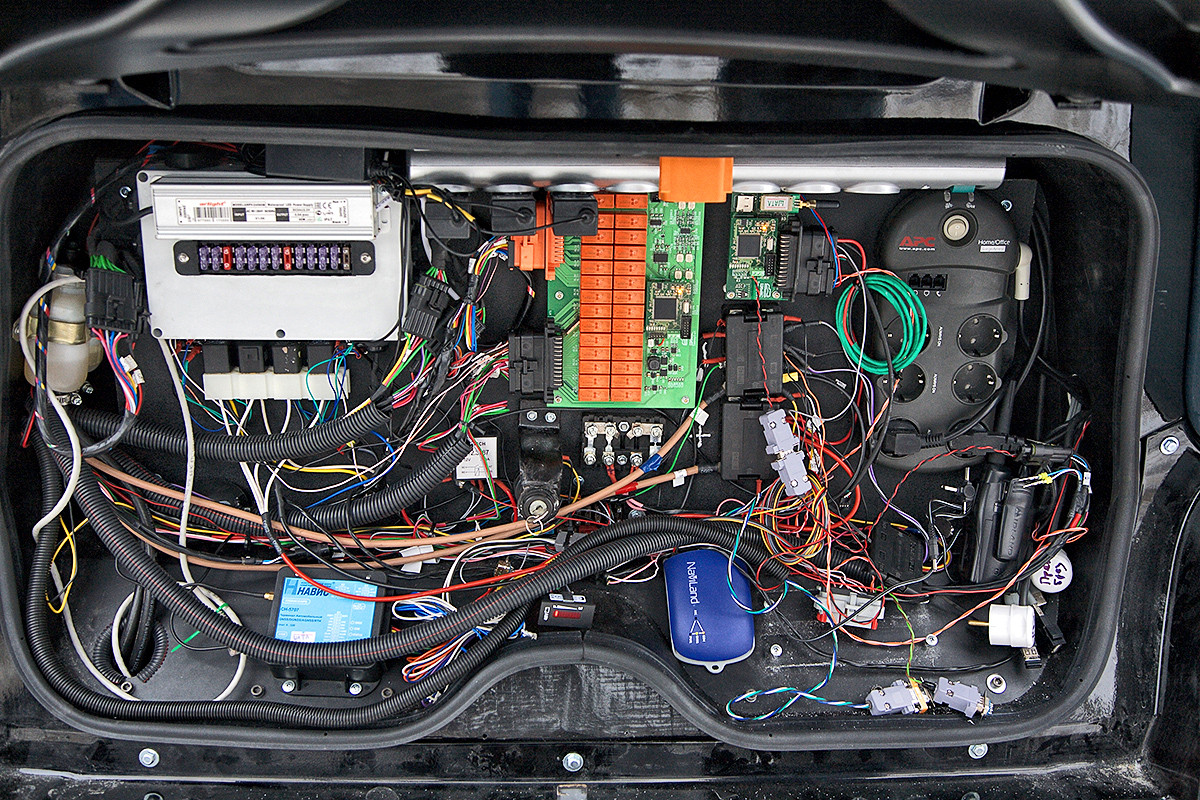
Наши же пришли к выводу, что камер и радаров вполне достаточно, чтобы машина улавливала все препятствия, принимала решения по изменению траектории, считывала дорожные знаки. Первичную информацию для анализа дает видеокамера. По мере приближения к машине подозрительных объектов – как выявленных камерой, так и пропущенных, они попадают в зону действия радара дальнего действия. Данные от устройств синхронизируются, что дает возможность
отсеять неверную информацию. Если у дальнего радара и камеры обнаружились разночтения, электроника дает команду на сброс скорости, чтобы в момент появления спорного объекта в зоне видимости ближнего (40-50 м) радара можно было избежать столкновения, экстренно затормозив автомобиль. Добавим сюда знакомые всем ультразвуковые датчики, которые стоят сейчас практически в каждом автомобиле и помогают водителю при парковке, и получим полный набор «железа».













В настоящее время «Калина» тренируется определять оптимальный путь к заданной точке и выдерживать траекторию – ездит по территории института на первой передаче с ограниченной скоростью, не переходя на вторую, а блок управления движением- «мозги» учатся отфильтровывать помехи, передаваемые «зрительными нервами». Ну, а как автомобиль определяет свое положение на местности, и каждый школьник объяснит – по GPS!... И это будет только частью правды. Правильно говорить, что идет комплексирование тех систем: спутниковой (включая GPS и российскую ГЛОНАСС), инерциальной и одометрической. Соединение и обработка информации единовременно со всех систем обеспечивает необходимый уровень достоверности отображения внешней среды. Если вдруг пропадет связь с американскими спутниками, ничего страшного не случится. Есть еще российский ГЛОНАСС. При полной потере связи со спутниками используются инерциальные датчики навигационной системы и математический аппарат по расчету траектории по данным датчиков оборотов каждого колеса.

Знакомый прибор
Камера в водонепроницаемом кожухе на крыше «Калины» вовсе не элемент системы технического зрения. В ходе исследовательских испытаний она помогает инженерам НАМИ собирать текущую информацию о внешней среде и в синхронизированном с другими датчиками системы управления движения является предметом анализа испытателей. Весь автомобиль увешан видеокамерами и регистраторами. Это позволяет фиксировать любой момент движения испытываемого беспилотника, включая поворот руля и положение рычага переключения передач. На двух Калинах откатываются немного разные конфигурации системы автономного движения и только в конце испытаний будет выбрана окончательная концепция.ШАТЛ. С ТОЧНОСТЬЮ ДО ПОДЪЕЗДА
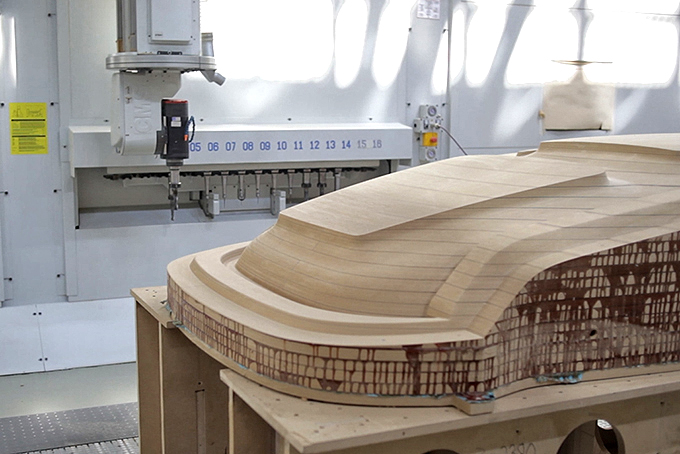
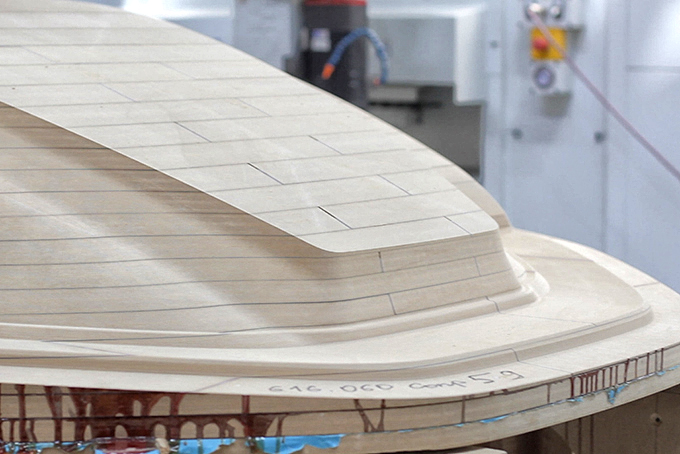
Этот микроавтобус в отличие от «Калины» имеет вид! Выглядит он миллионов на двадцать, а стоит, по словам Алексея Гогенко, заместителя гендиректора ФГУП «НАМИ», примерно пятнадцать. Не зря поработали дизайнеры НАМИ – хоть сейчас на Женевском салоне выставляй. Трудно поверить, но все оригинальные детали 6-местного кузова изготовили на Автомоторной ул. на специально спроектированной для этого оснастке. В НАМИ создано целое производство по быстрому прототипированию и изготовлению малых серий автомобилей и агрегатов. При необходимости ШАТЛ можно «повторить» на этой же оснастке сколько угодно раз, но делать серию дешевле все же будет на конвейере – производственным партнером проекта стал КамАЗ.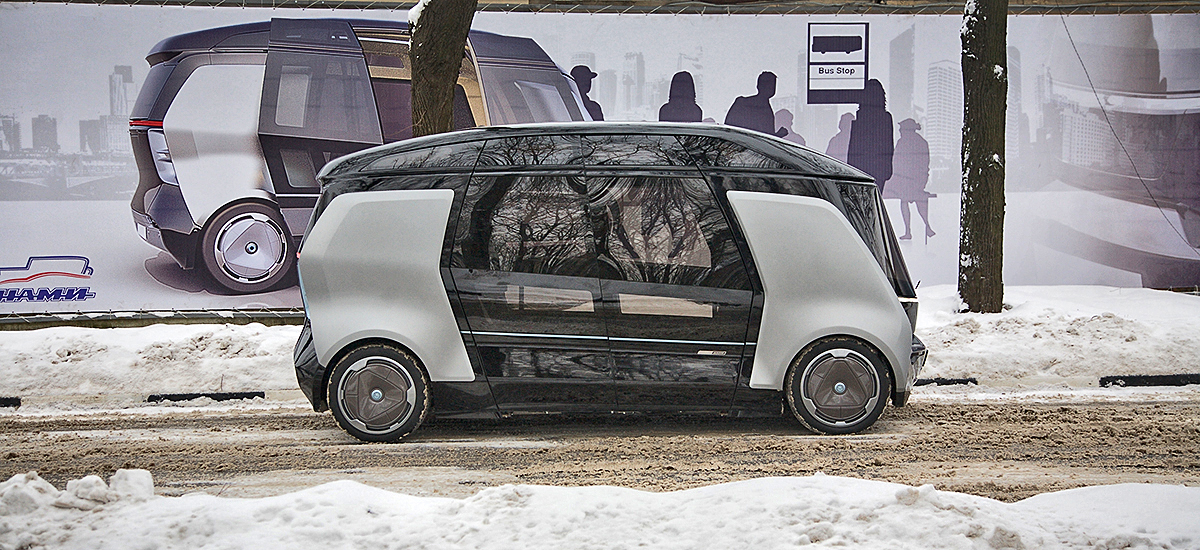
В теории билеты должны быть по карману каждому, ведь существенную экономию даст сам беспилотный принцип. Кроме того, основным источником дохода станет продажа прав на трансляцию информационно-медийного контента и различные платные сервисы на борту. Собственно, примеры такого подхода есть и у нас, когда пассажиры маршруток смотрят промо-сюжеты на подвешенном к потолку экране. А, к примеру, пассажиры шанхайского метро во время движения смотрят ролики на… стене туннеля, по которому едет поезд.









Сколько же ШАТЛов нужно Москве? Как показывают несложные расчеты, примерно 30 тысяч. А ведь сегодня в сутки жителей столицы обслуживают около 8500 единиц общественного транспорта. Это ж сколько денег понадобится? Пусть не 20 миллионов и не 15, пусть только 5 миллионов будет стоить каждый беспилотный 12-местный КамАЗ, и тогда вся система «от подъезда до подъезда» обойдется в 150 млрд. Много? Как сказать. Это примерно двенадцатая часть запланированных на 2017-й доходов Москвы. Так что будем ждать: уже через год можно ожидать пилотную эксплуатацию ШАТЛов на закрытых территориях, а с выходом нормативных требований для беспилотных автомобилей ожидаем выезд ШАТЛов на улицы столицы.
Из какого теста?
Кузов ШАТЛа изготовлен из композитных материалов на основе стеклопластика, а вовсе не из углепластика, как можно было бы подумать; у внешних панелей и силового композитного каркаса различные структура и свойства. В конструкции, само собой, имеются и металлические детали: алюминиевые кронштейны крепления узлов и агрегатов, а также стальные элементы ходовой части.Главная проблема электроШАТЛа сегодня – обеспечение запаса хода. Сейчас на ходовом макете установлена технологическая батарея, а какая будет на конвейерном образце, пока не утверждено. По словам куратора проекта Алексея Гуськова, тяговая аккумуляторная батарея (ТАБ) совершенно точно будет литий-ионной и с высокой долей вероятности – без контура жидкостной терморегуляции, но обязательной для нашего климата системой термостатирования.. Сейчас работа идет с тремя типами ТАБ, точнее, с ячейками, для которых в лабораториях НАМИ создают условия, близкие к реальным. Выяснилось, что основной проблемой является неустойчивая работа литий-ионных ячеек в режиме заряда при температуре ниже -10градС. Готовых батарей под нужды НАМИ на рынке не нашлось, поэтому собирать (корпусировать) ТАБ будут по собственному проекту. К лету испытания с ячейками планируют завершить и установить на ходовой макет уже другой аккумулятор, с повышенной энергоемкостью.

Пока не найдено окончательное решение по приводу боковых дверей. Сейчас этим заведует маломощный компрессор, накачивающий воздух в ресивер – двери открываются пневматикой. Этот насос потребляет мало энергии, а вот существующие предложения по электроприводу дверей сильно энергозатратнее, а значит ищем опять компромиссное решение с учетом сохранения заряда ТАБ.